-
Fonctionnement du drone en vol
Vol stationnaire :
En tournant, les hélices vont créer une force de sustentation ( effet d’une force qui maintient un corps à faible distance au dessus d’une surface et sans contact avec elle ) qui vont compenser le poids de l’engin. Lorsque cette force est supérieure au poids du multicoptère, il s’élève dans les airs. Le sens de rotation des hélices est très important, sur le schéma ci-dessous, on constate que les hélices situées sur le même axe tournent dans le même sens. En d’autres termes, M1 et M3 tournent dans le sens horaire et M2 et M4 dans le sens antihoraire. Pourquoi ? Cela annule le couple induit par l’effort sur chaque moteur pour faire tourner les hélices.

Monter/descendre :
Pour monter, on augmente la vitesse des moteurs simultanément, tous les moteurs tournent au même régime et inversement pour descendre, c’est la commande des gaz.

Avancer/reculer :
Pour avancer, on va diminuer la vitesse des moteurs avant et augmenter la vitesse des moteurs arrière et inversement pour reculer. On appelle cette action le tangage.

Gauche/Droite :
Pour incliner vers la gauche, on va diminuer les moteurs de gauche M1 et M2 et augmenter ceux de droite M3 et M4. Inversement pour incliner vers la droite. Cette action s’appelle le Roulie.

Rotation :
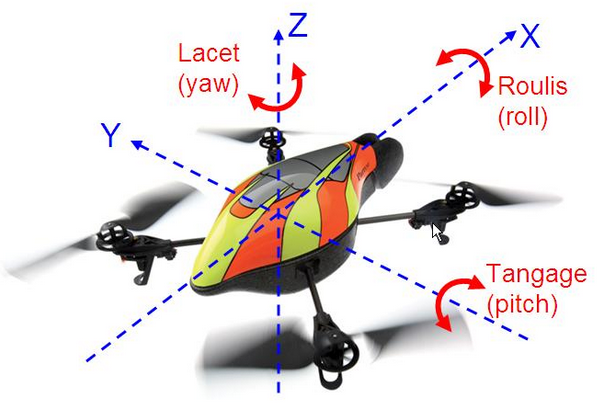
Pour un mouvement de rotation , on va augmenter la vitesse d’une paire de moteurs sur le même axe et inversement. Ceci est un mouvement de lacet.
3 gyroscopes sont indispensables pour le bon fonctionnement d'un drone :
-Lacet pour l'axe Z
-Roulis pour l'axe x
-Tangage pour l'axe y
On parle de "centrale inertielle" qui est l'association de l'ensemble des capteurs avec le logiciel embarqué et le hard pour le faire tourner. Il suffit de réfléchir 2 secondes pour s'apercevoir qu'il y a 6 mouvements à stabiliser et à contrôler :
-
A) les X, Y et Z linéaires
-
B) les rotations autour de ces 3 axes.

Dans le cas de ce drone, les capteurs sont utilisés sont les suivants
-
3 accéléromètres (détecte des variations de vitesse linéaire – A), un pour chaque axe
-
3 gyroscopes (détecte des variations de vitesse angulaire – B), un pour chaque axe.
Du fait de la mauvaise réactivité des actuateurs dans un quadri à pas fixe (actuateur = terme utilisé dans la notion de boucle d'asservissement, ici ce sont les moteurs/hélices), le lacet est le plus difficile à stabiliser efficacement, c'est la raison pour laquelle un gyroscope dit "de précision" est utilisé, pour "anticiper" le plus rapidement possible toute variation non souhaitée du lacet.
mais dans la réalité, les capteurs ne sont pas parfaits. Tout appareil de mesure, une fois calibré correctement, possède une précision assez bonne mais que dans une plage limitée des valeurs qu'il mesure, et des conditions dans lesquelles la mesure est effectuée.
En effet, les accéléromètres donnent en sortie des tensions proportionnelles aux mouvements qu'ils détectent. Mais, lorsque ces mouvements sont trop importants et/ou avec des vibrations ou autre facteur environnemental perturbateur (température…), on est alors hors plage de mesure fiable. Il faut donc s'appuyer sur d'autres moyens de mesures des mouvements pour épauler les accéléromètres et gyroscopes.
Sur la plupart des multirotors, on utilise le GPS pour seconder les accéléromètres et gyroscopes du X et Y, des capteurs barométriques pour ceux du Z et même des capteurs magnétiques permettant de mesurer le champ magnétique terrestre, pour encore plus de précision sur le lacet. C’est notamment le cas des MikroKopters
Dans le cas du drone Parrot, c’est une camera qui « regarde » le sol et dont l’image est analysée pour détecter les dérives en X et Y et donner l’info qui va bien au système pour les compenser. Idée très sympa, mais efficace tant qu’on ne dépasse pas 3 ou 4 mètres d’altitude et qui nécessite un sol présentant des variations de contrastes, de textures, etc… suffisantes pour que l’analyse d’image soit optimale. Au dessus d’un sol parfaitement uniforme, ça ne fonctionne pas super bien …
Pour le Z, Parrot a "secondé" l'accéléromètre du Z avec un capteur à ultrasons. Ce capteur est constitué de 2 parties : un émetteur d’ultrasons dirigé vers le bas, les ultrasons « rebondissent » sur le sol et remontent vers le récepteur à ultrasons, et le delta de temps entre l’émission et la réception permet d’estimer l’altitude.
Personnellement, je trouve ce choix assez nul, car certes ça marche bien, mais tant qu’on ne dépasse pas 2 ou 3 mètres. De plus, ça dépend de la nature du sol (herbes hautes…), et ça pose plein de problème de gestion d’altitude, qui sont d’ailleurs assez mal adressés par le soft de ce drone (de nombreux bugs sur la gestion de l’altitude ont été décelés par les utilisateurs). Un capteur barométrique eut été bien plus judicieux, car précis (2 ou 3 cm …) et surtout permettrait de lever la limitation de compensation d’altitude (3 ou 4 mètres…) due au choix de ce capteur à ultrasons. Le top serait d’avoir les 2 : les US pour gérer décollage/atterrissage et la sonde barométrique pour gérer l’altitude pendant le vol. Peut-être dans une prochaine version ?
Pour les détections de mouvements de rotations autour des 3 axes, les gyros sont amplement suffisants pour ce drone Parrot, pas besoin de les seconder. (Bien que très certainement l’analyse d’image de la camera sol contribue à la stabilisation du lacet)
Avec tous ces capteurs, il faut maintenant savoir "traiter" leur signal, en l’épurant de tout parasite et autres valeurs aberrantes, pour ensuite calculer l'ordre a donner aux actuateurs (moteurs) pour compenser les mouvements parasites, bref, pour stabiliser le drone.
Pour cela,beaucoup méthodes de calculs plus ou moins complexes existe mais dans se cas précis l'AR drone utilise la théorie des boucles d'asservissement avec le fameux PID. Il s'agit une formule à 3 paramètres: P pour Proportionnal, I pour Integral et D pour Differential.
C'est un organe de contrôle permettant d’effectuer une régulation en boucle fermée d’une grandeur physique d'un système industriel. C’est le régulateur le plus utilisé dans l’industrie, et il permet de régler un grand nombre de grandeurs physiques. Un correcteur est un algorithme de calcul qui délivre un signal de commande à partir de la différence entre la consigne et la mesure.
Le correcteur PID agit de trois manières :
-
action proportionnelle : l'erreur est multipliée par un gain G.
-
action intégral : l'erreur est intégrée et divisée par un gain Ti.
-
Action dérivée : l'erreur est dérivée et multipliée par un gain Td.
Il existe plusieurs architectures possibles pour combiner les trois effets (série, parallèle ou mixte), on présente ci-dessus une architecture parallèle.
Ces 3 paramètres permettent donc d'ajuster (sur un axe) les ordres à transmettre en fonction des capacités des actuateurs, l'inertie de l'engin, etc... Nous avons donc 3 valeurs de paramètres à trouver. C'est la clef de la stabilisation du drone. Leurs valeurs optimales sont généralement trouvées par essais successifs (plein de méthodes pour cela).
-
trop de P => oscillations rapide autour de l'axe stabilisé
-
trop de I => oscillations lentes
-
trop de D => consigne visée dépassée



-
-
Commentaires
2BiteSamedi 13 Janvier 2018 à 17:04bite
-
mocheMardi 19 Mars 2019 à 18:14
moche
-
Dimanche 5 Mai 2019 à 00:17
Si tu veux une roulotte mon cousin t'a qu'a venir me voir
-
3la guez d'algérieVendredi 23 Mars 2018 à 15:21Merci pour votre travail on a fini notre tipe
-
Dimanche 5 Mai 2019 à 00:19
Tes mon gars sûr la guez
-
4hopeMardi 18 Septembre 2018 à 22:335DE LA TERRE D'ALGERILundi 8 Octobre 2018 à 14:386EinsteinDimanche 19 Mai 2019 à 13:40Trop technique pour les cerveaux de limace qui font des commentaires.
Des analphabètes avec qui nous serions encore à la préhistoire.
Des débris d'une copulation inachevée.
Pauvre France !
7chirac chuis mor lolJeudi 3 Octobre 2019 à 13:188einstein 2.OMercredi 20 Novembre 2019 à 15:09je suis très déçu par la conduite et la vulgarité de vos ignobles et malheureux commentaires en rapport avec ce merveilleux travail.
Est ce cela notre malencontreuse génération maudite ?
je suis très déçu du vocabulaire pervers et rachitique des jeunes de nos jours comptés.
9CHAUSSE AU MOINESMercredi 20 Novembre 2019 à 15:1010AUDDJeudi 21 Novembre 2019 à 16:4911AbdelMardi 7 Janvier 2020 à 16:5112Jean Claude Van DamnMardi 7 Janvier 2020 à 16:52Donnez moi l'analyse harmonique en série de Fourrier en suivant la méthode de Sturm Liouville
13RionatorMercredi 1er Juillet 2020 à 02:09Incroyable travail merci d’avoir mis ça à disposition, je vais pouvoir construire mon drone sur mesure pour livrer les clients !!
En vous remerciant,14BINKSSSMardi 20 Avril 2021 à 12:18BAAO15TardigradeMardi 20 Avril 2021 à 12:1916NiewMercredi 17 Novembre 2021 à 15:4817tLundi 19 Septembre 2022 à 09:5418mac eémolMercredi 10 Mai 2023 à 16:53merci pour les expliquation elle ma pauquoi edet
-
MAbite est aussi molMercredi 10 Mai 2023 à 16:55
JE suis daccord
-
MAbite est aussi molMercredi 10 Mai 2023 à 16:56
JE SUIS D4ACCORD PD
-
19mac eémolMercredi 10 Mai 2023 à 16:54 Suivre le flux RSS des commentaires
Suivre le flux RSS des commentaires
 Ajouter un commentaire
Ajouter un commentaire





|
|
|
|
xx
oe oe on est la